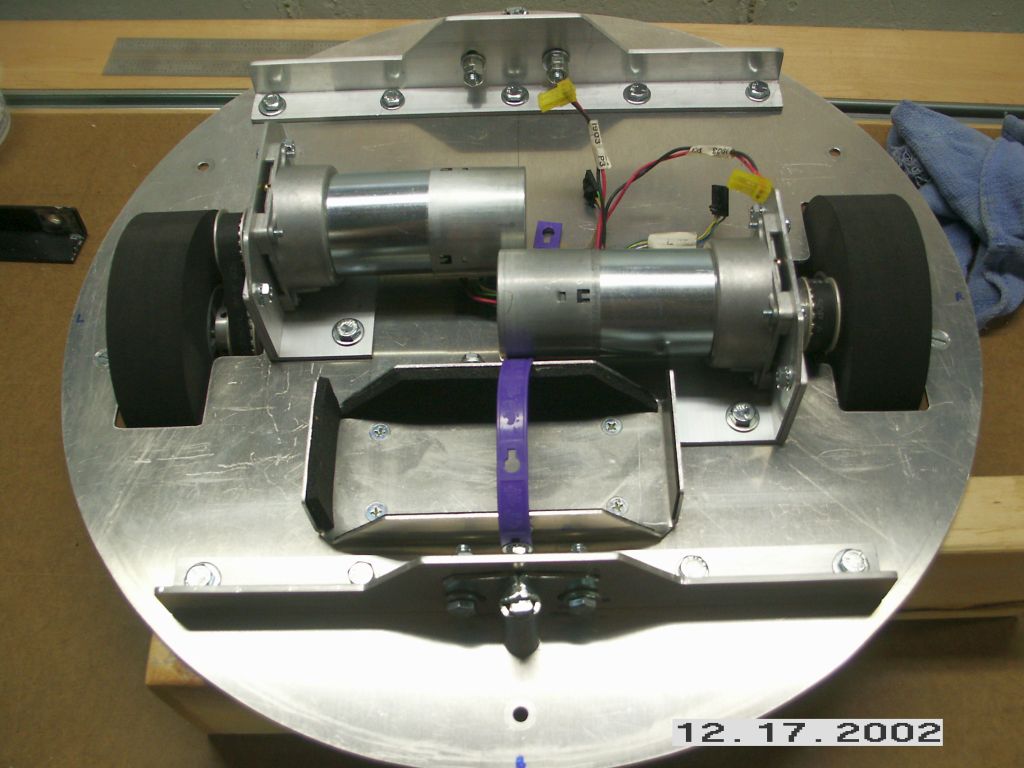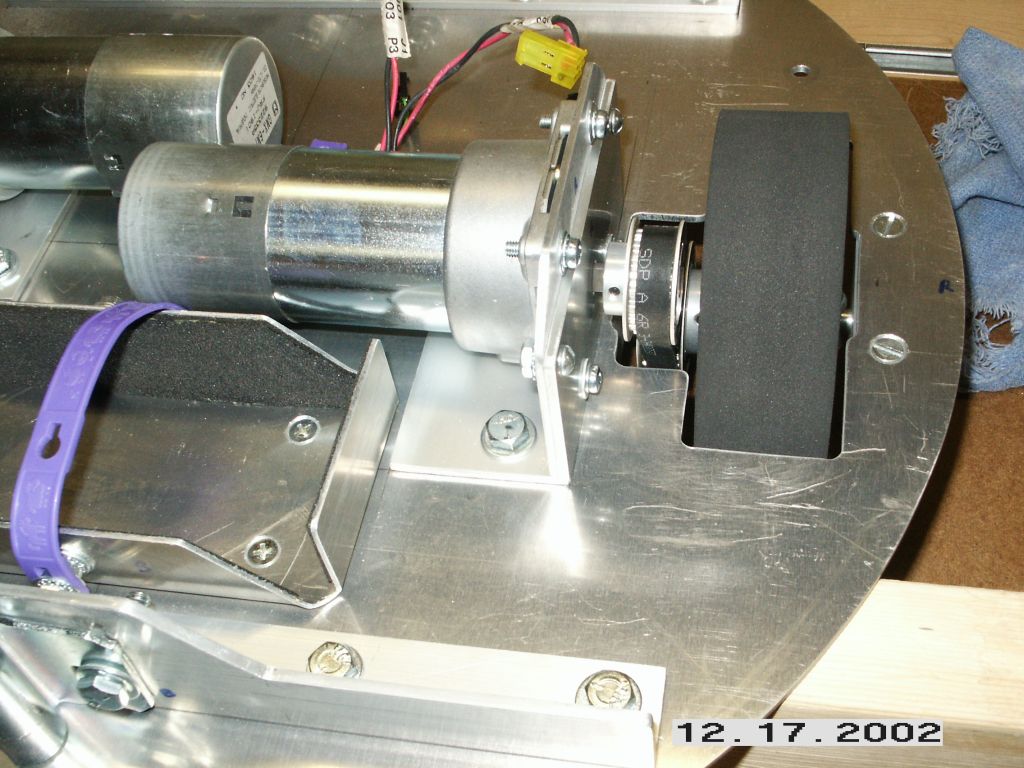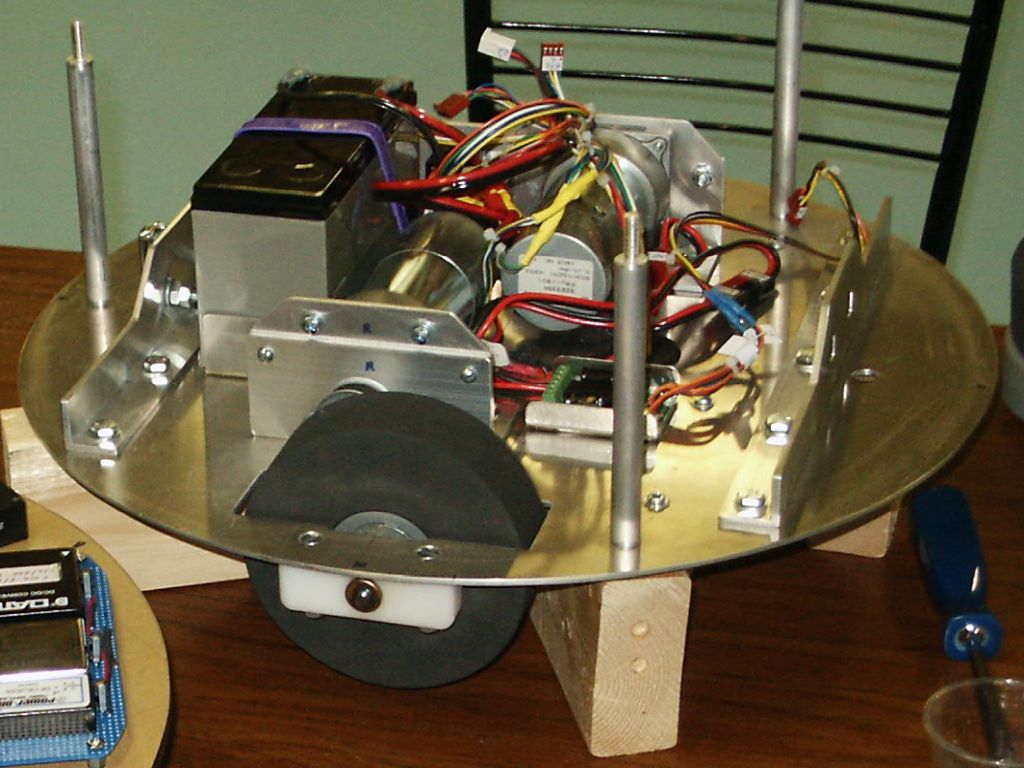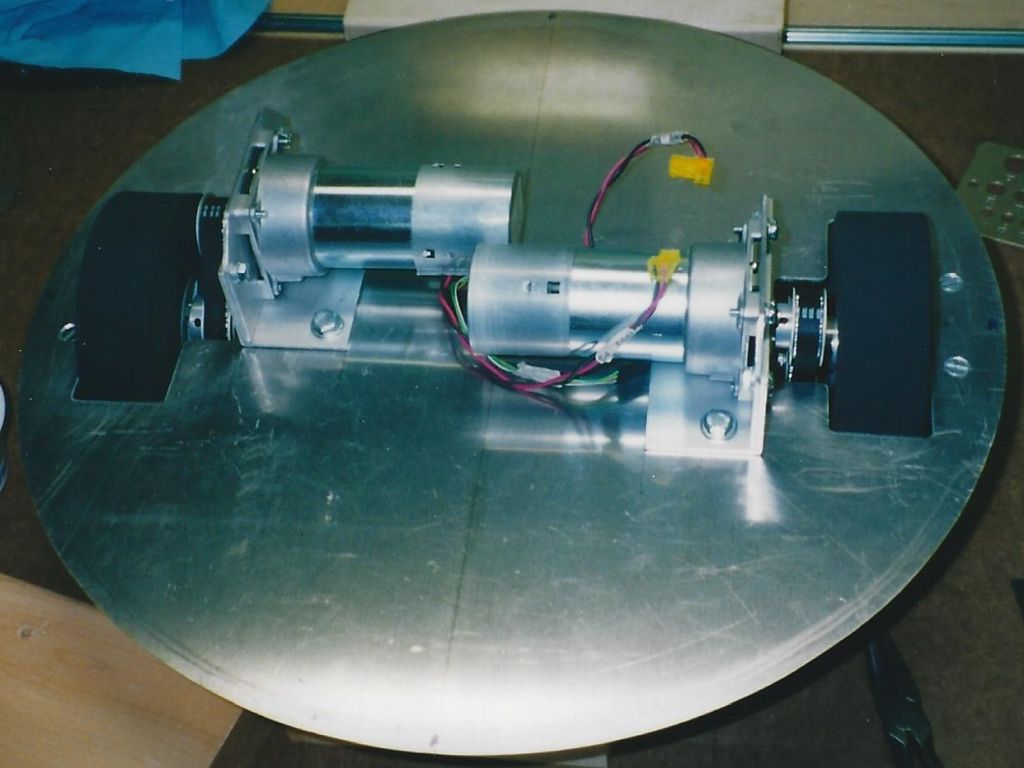
ERO 3 was almost a complete re-design. Motivated by frustration with the
turning radius of the R/C truck platform, the ERO 3 chassis is a completely
home-made 'traditional' round robot platform with differential drive: 2
wheels 180° opposed about the centerline of an 18" diameter base,
driven by 2 independent motors.
Other features of ERO 3 over ERO 2 include...
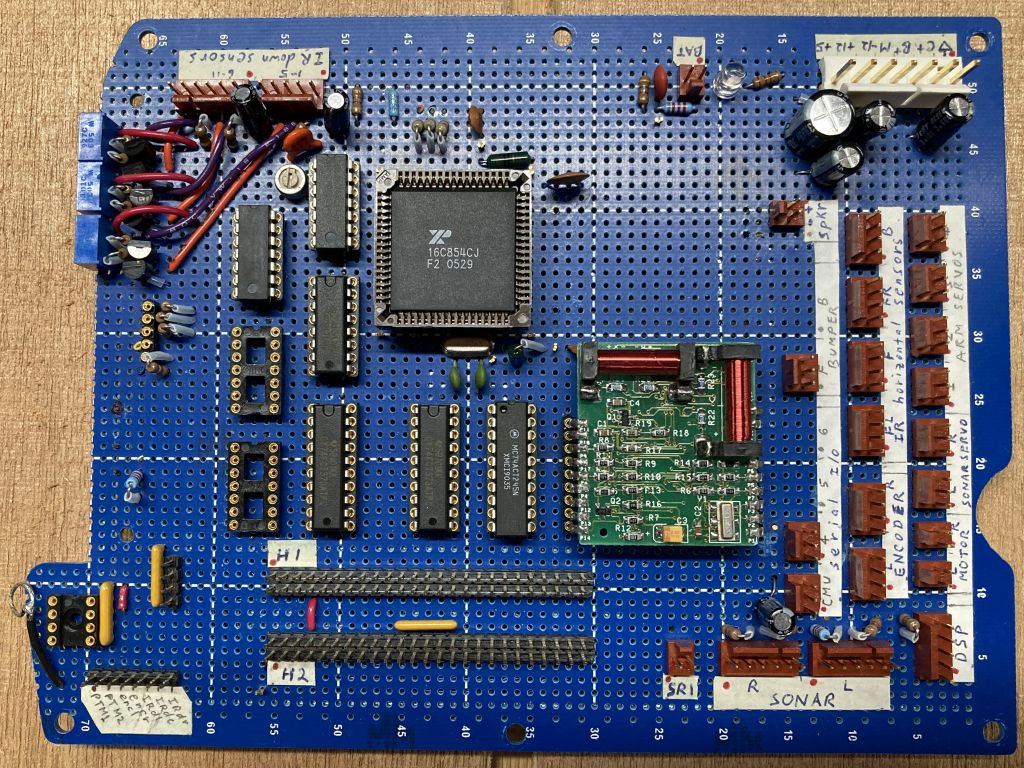
- Upgraded main processor to Motorola [Freescale] {NXP} MC9S12E128 (S12). It is code-compatible with the 68HC11, so most of the ERO 2 code could be re-used.
- Sex change! Replaced the
RC Systems
V8600 TTS (Text-To-Speech) module [which had a male voice], with an
Emic TTS
module. It has:
- better intelligibility (a subjective assessment)
- smaller footprint
- A female voice!
- Added a compass module
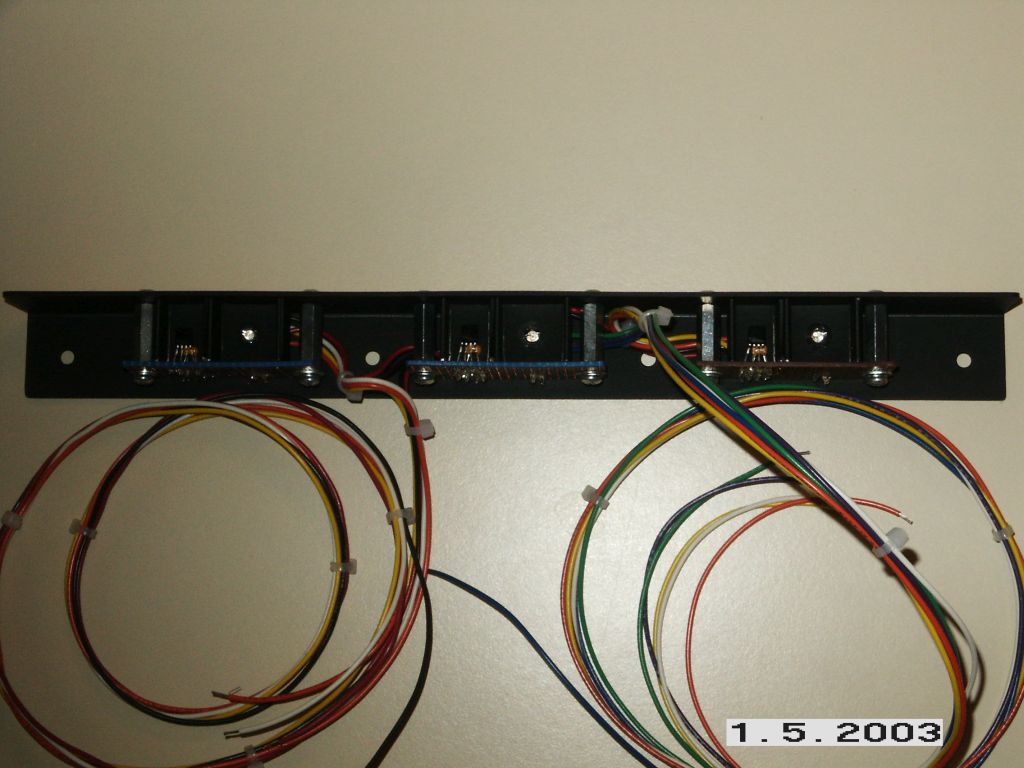
- Improved IR line following sensor array
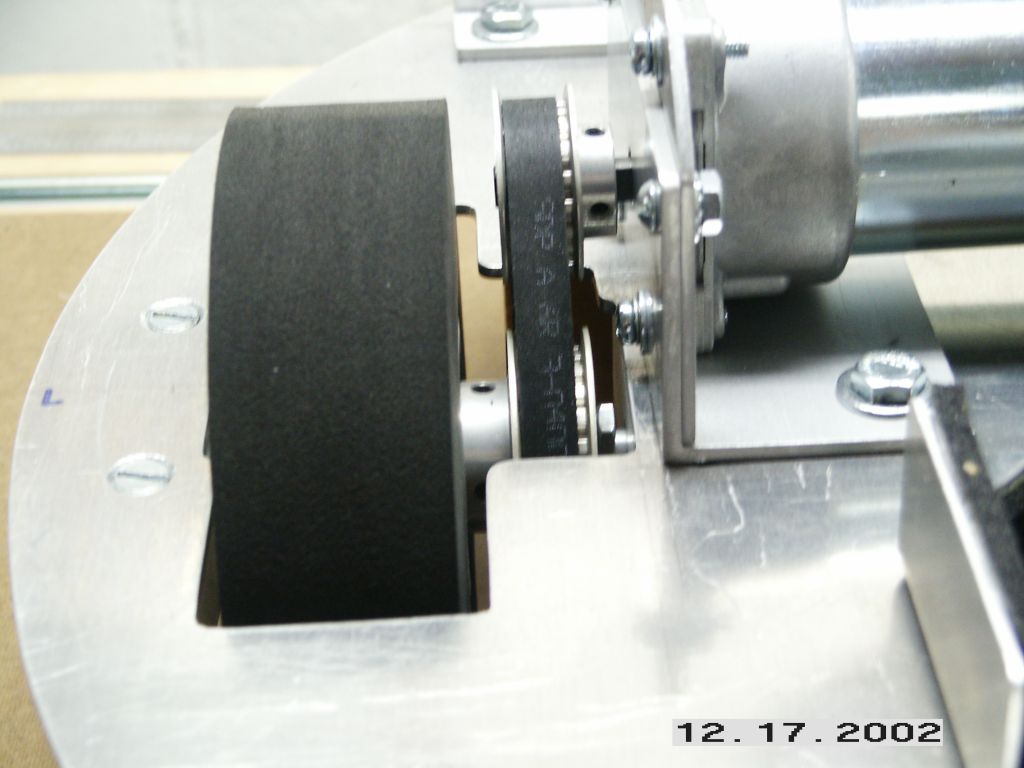
- Higher resolution encoders, internal to motors, for better PID control
The ERO 3 re-design began in December of 2001.
Due to the birth of our biological children, and a move out-of-state, ERO
sat in a box for nearly 3 years (from Oct. 2003 to June 2006).
ERO was officially re-born as ERO 3 on February 11, 2007.