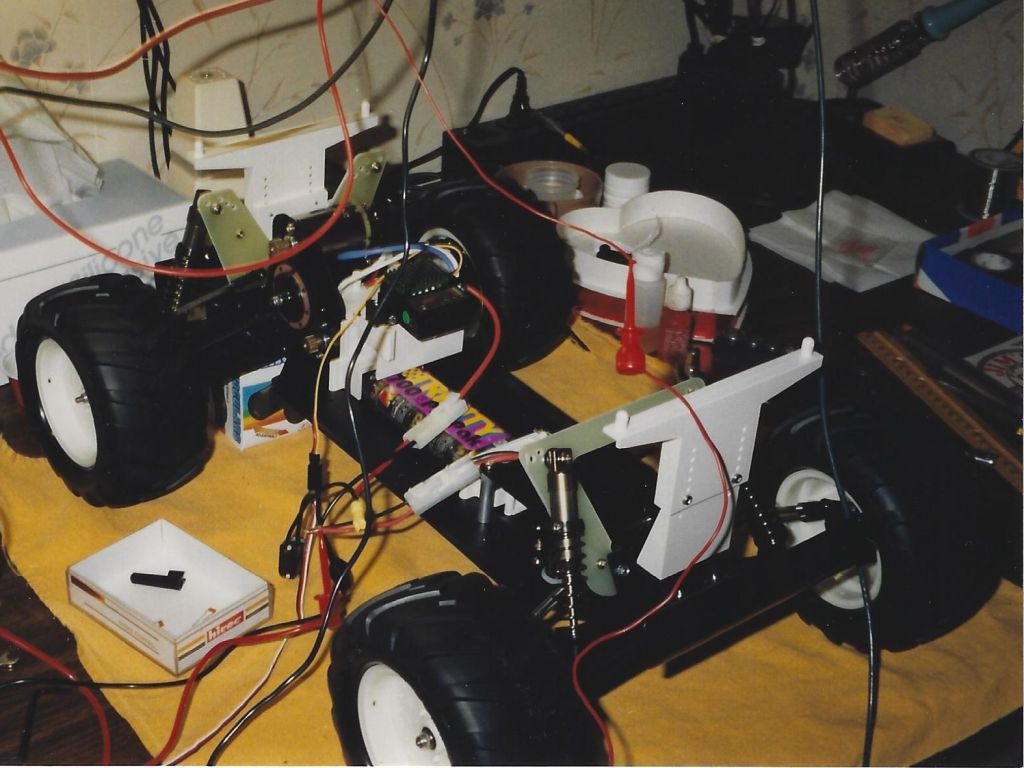
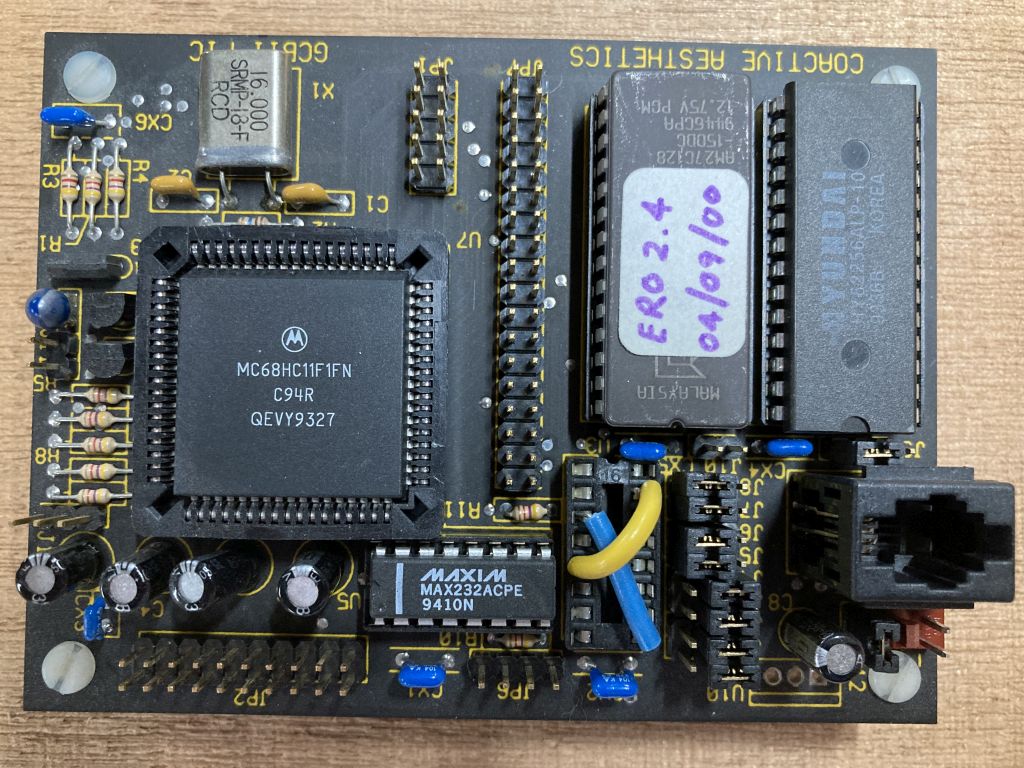
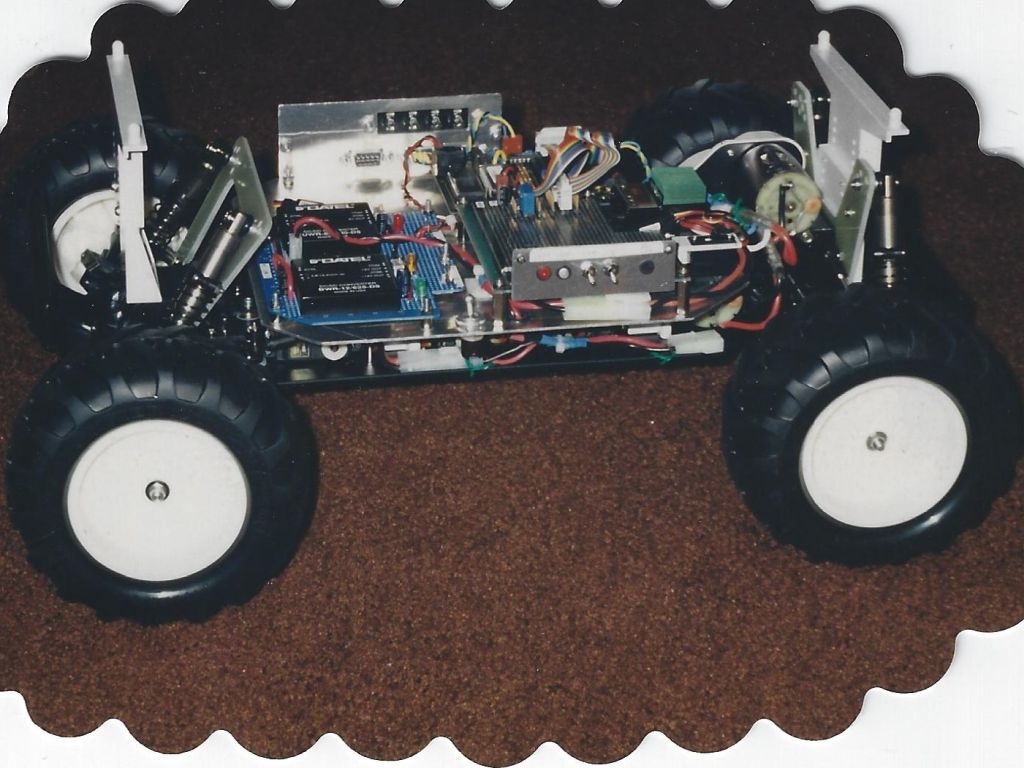
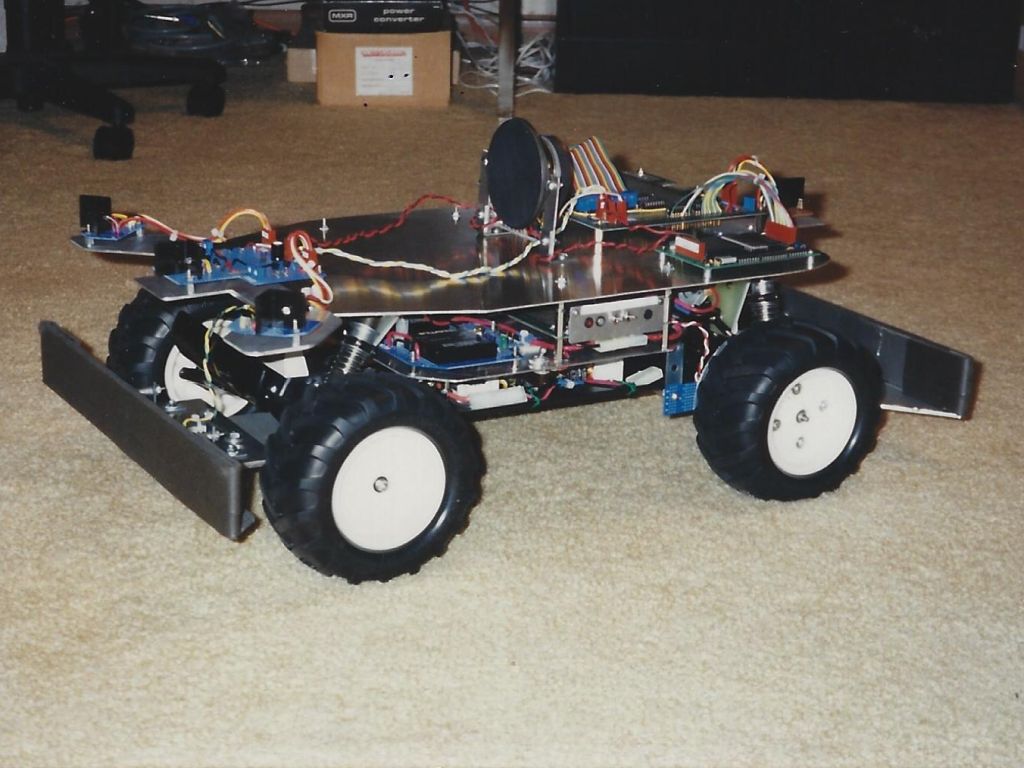
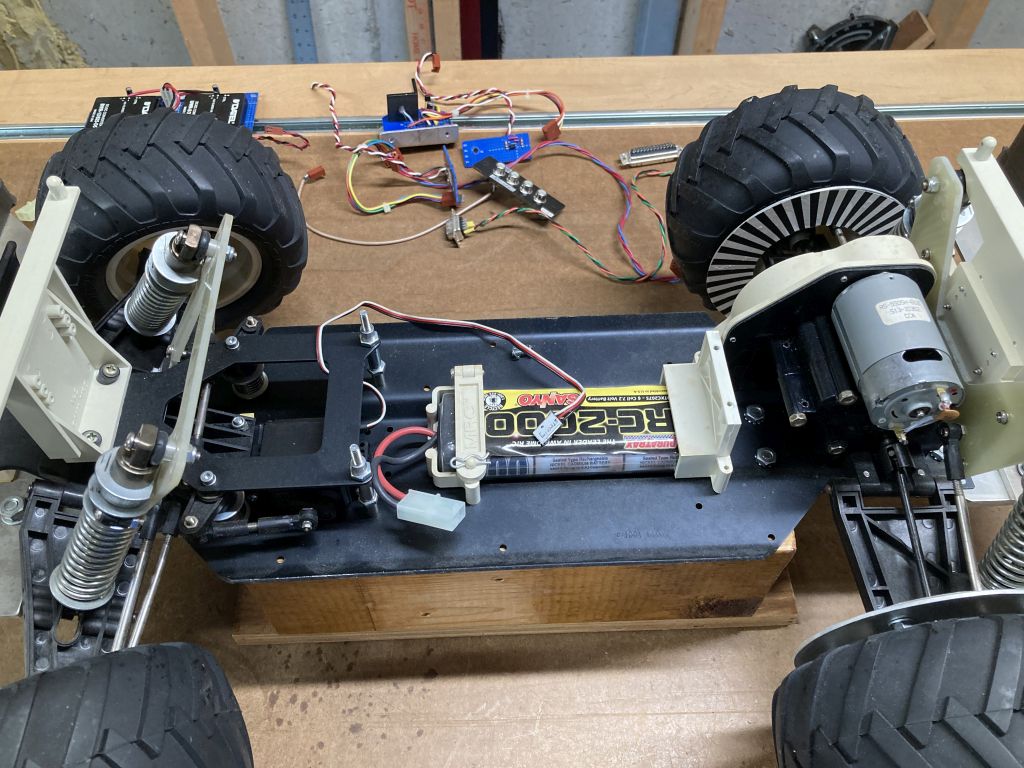
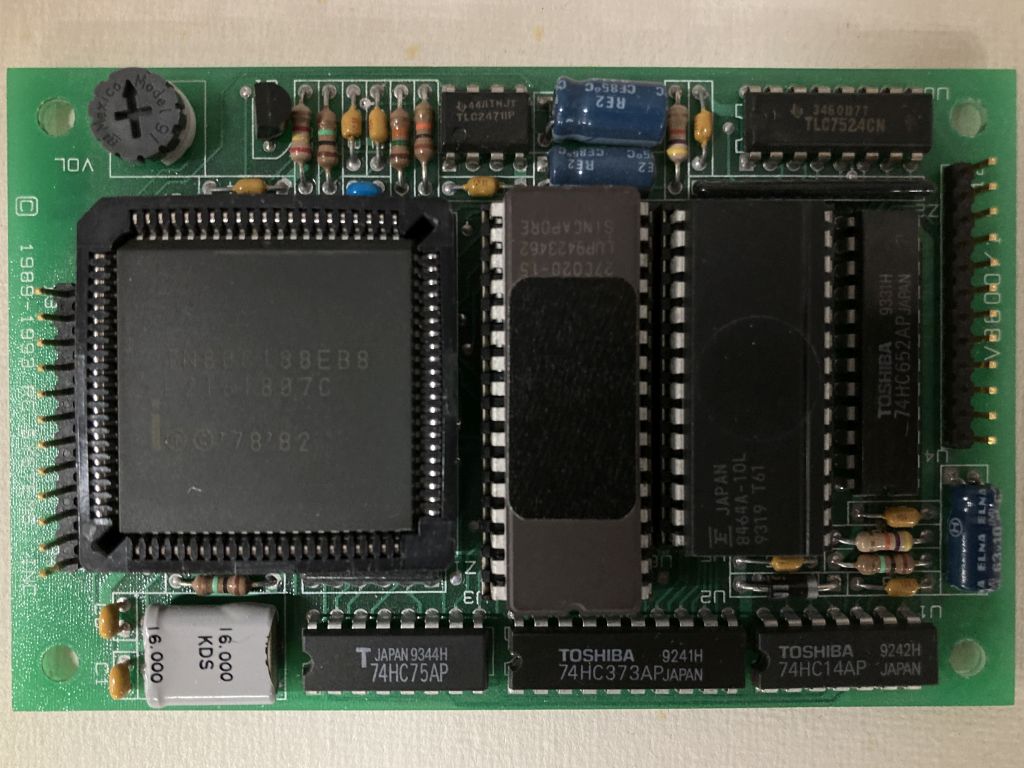
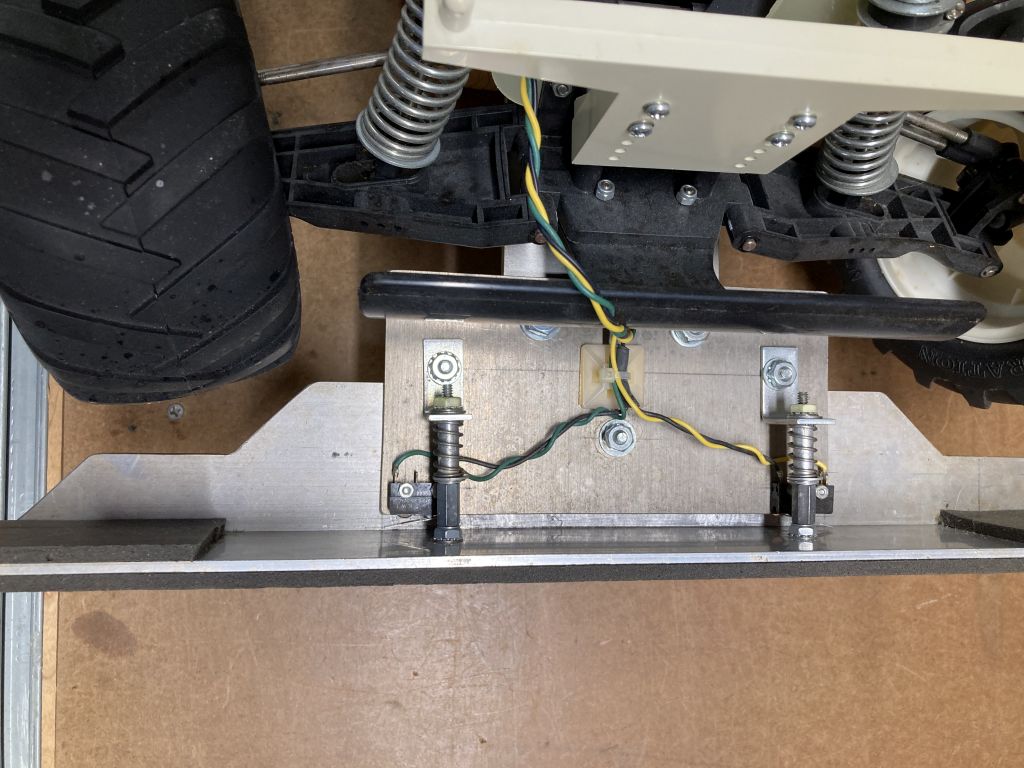
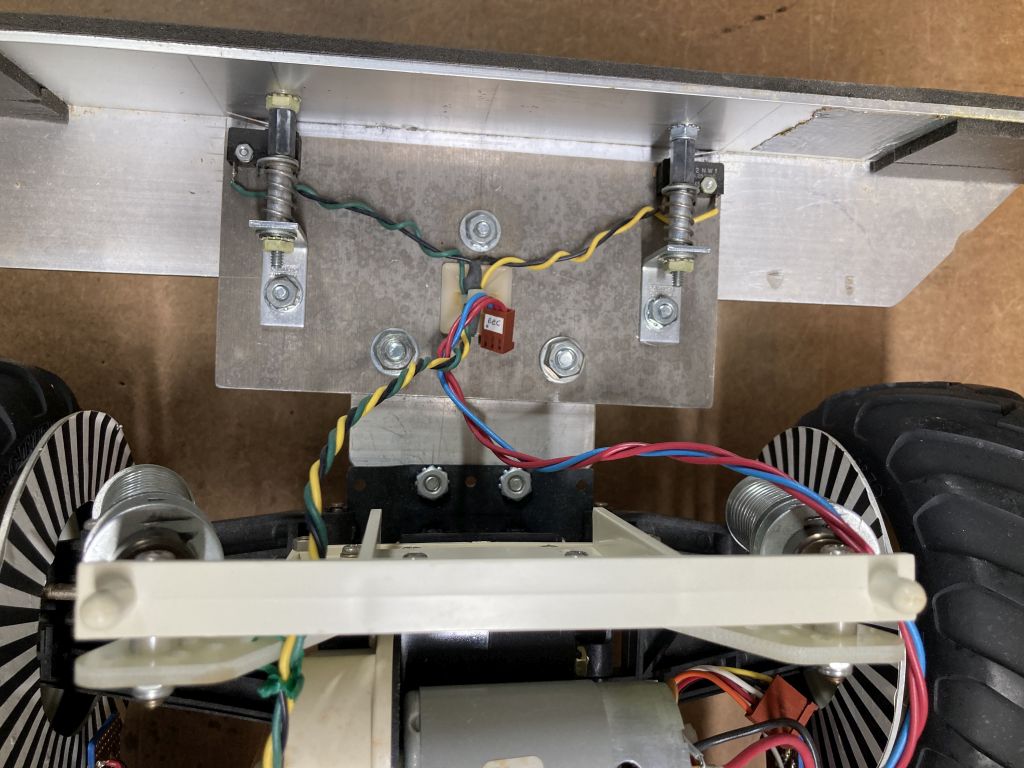
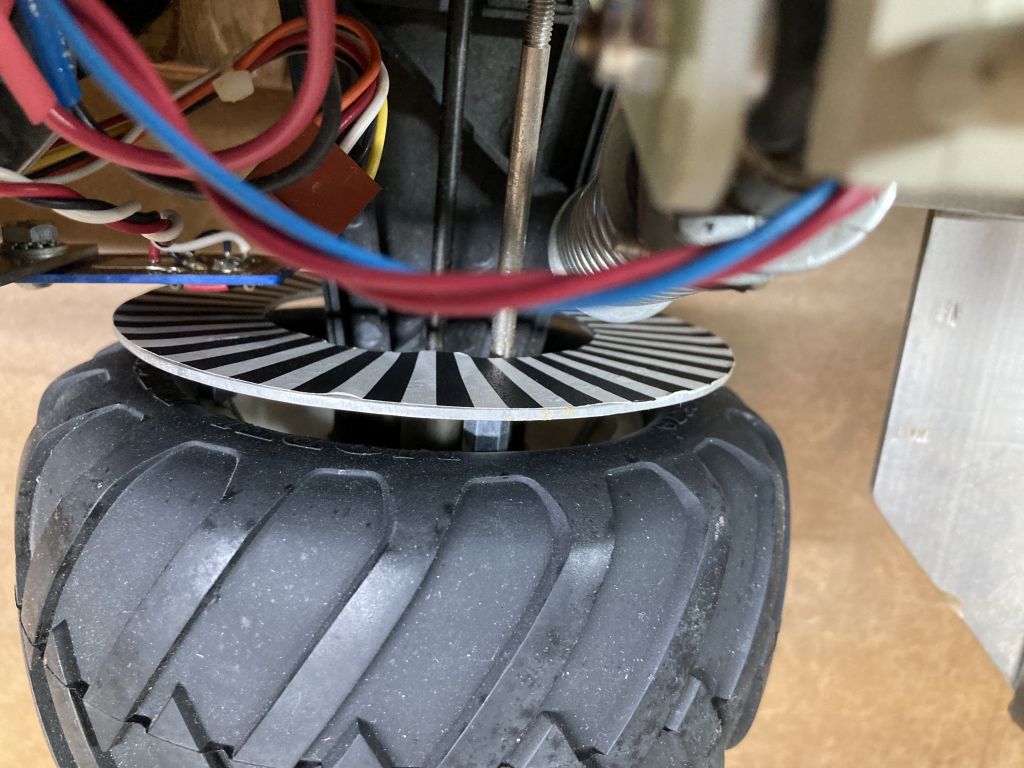
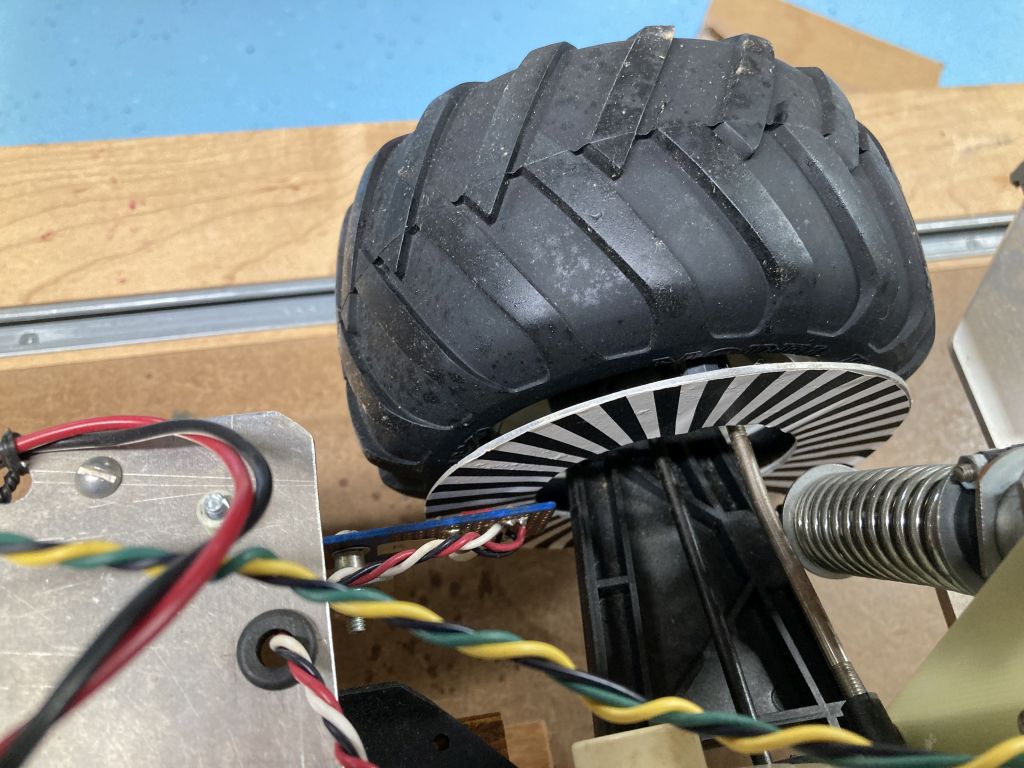
ERO 1 began as a radio controlled monster truck known as the MRC Thunderking. After adding a microcontroller (Motorola 68HC11), an electronic speed controller (RCD HiTec SP-560), and a simple firmware program, ERO was officially born (i.e., autonomously moved about for the first time) on November 20, 1994.