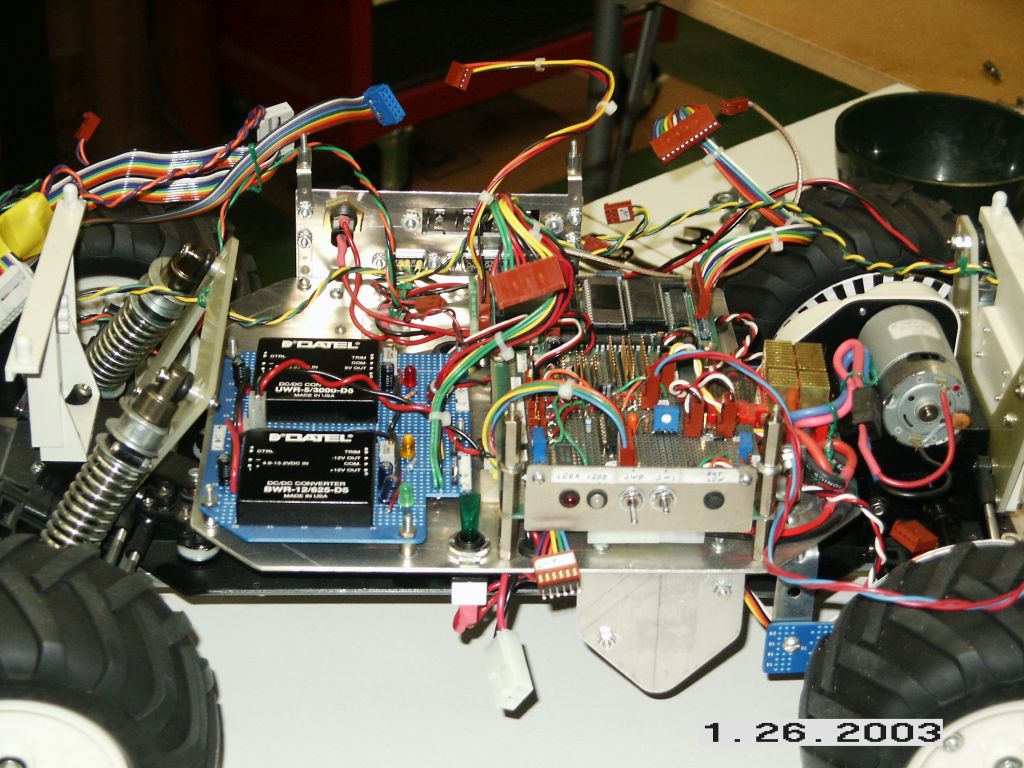
ERO 2 was also based on the MRC Thunderking R/C platform and the 68HC11 microcontroller. This revision was defined primarily by a more refined body.
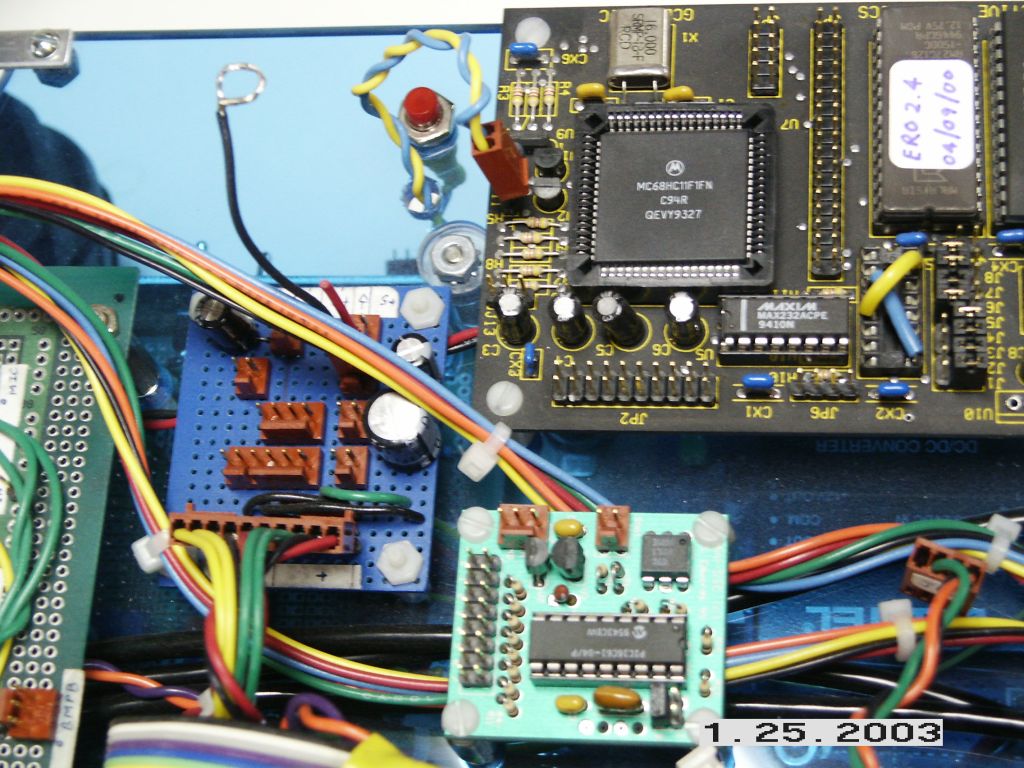
ERO 2 spanned software versions 2.0 (Dec. 1996) through 2.4 (Apr. 2000)
Features of ERO 2 over ERO 1 include...
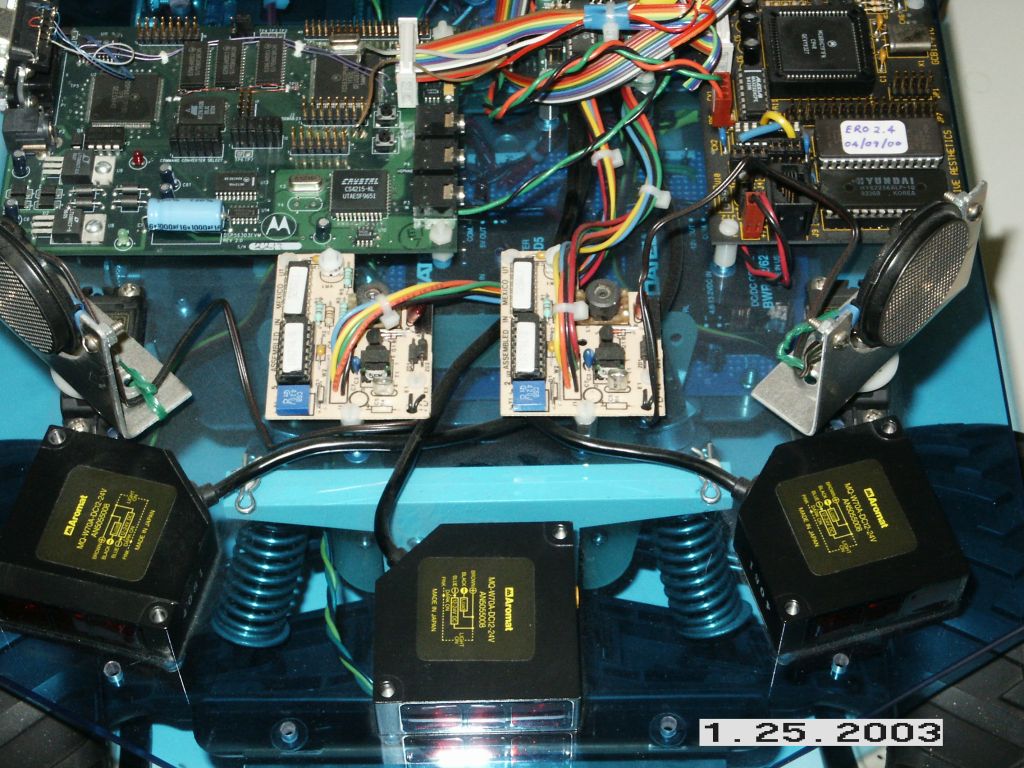
- Greatly improved IR horizontal sensors (3' range vs. 6" range)
- Added IR vertical sensors for line following
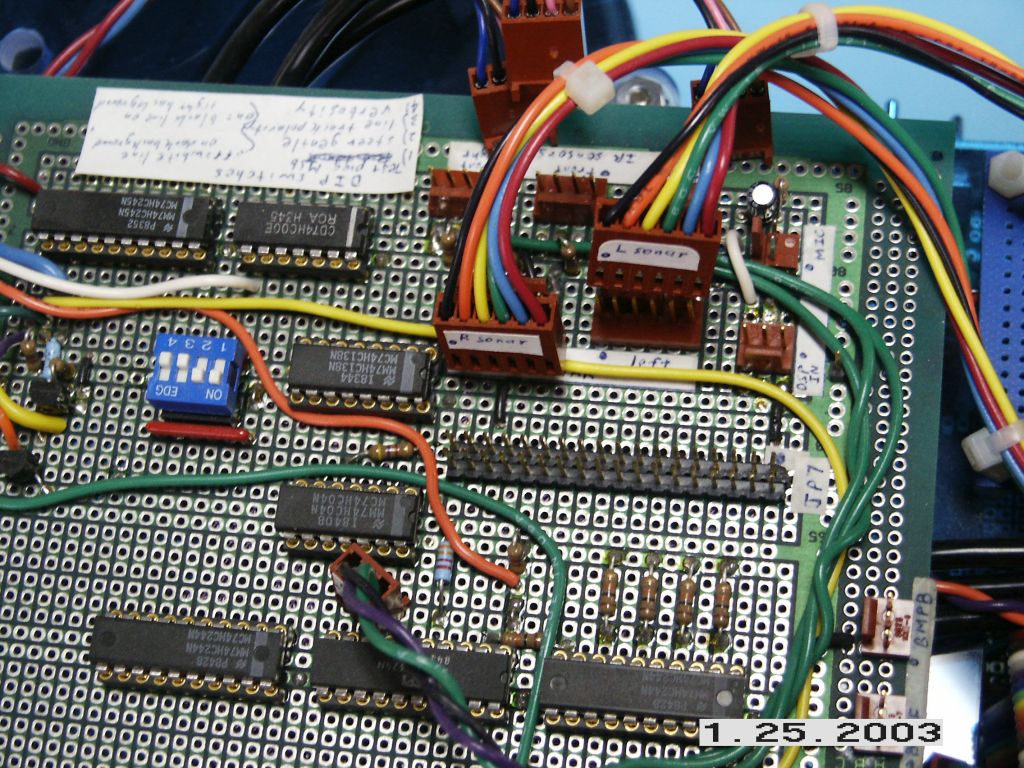
- Added sonar sensors mounted on servos for full 180° sweep capability
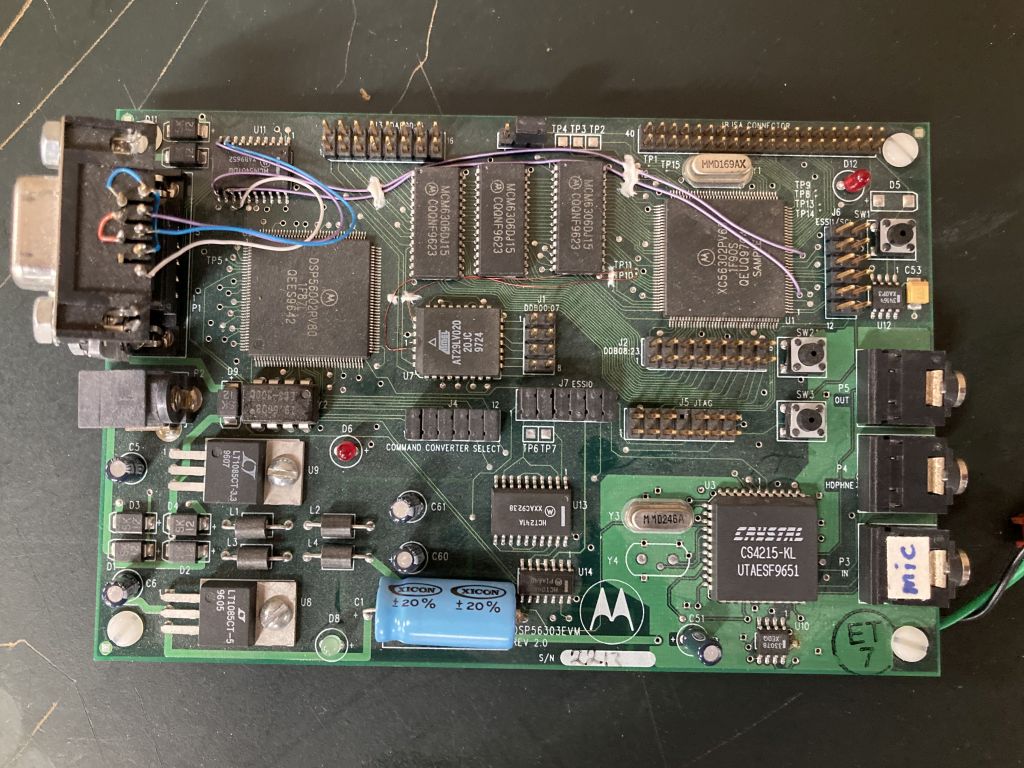
- v2.3 added 2nd processor board - Motorola DSP56302 - primarily used as a speech recognition peripheral